Come si comportano i pesci di fronte a un pesce-robot? Lo spiega una ricerca condotta tra Oristano e New York.
Stefano Marras (Iamc-Cnr) e Maurizio Porfiri (Nyu-Poly) sono gli autori di una ricerca sulle reazioni dei pesci di fronte a un pesce-robot.
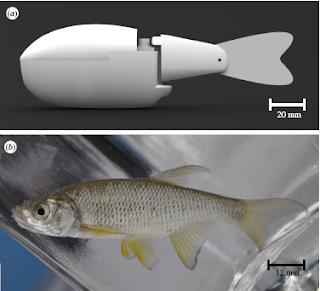
I ricercatori dell’Istituto per l’ambiente marino costiero del Consiglio nazionale delle ricerche di Oristano (Iamc-Cnr) e dell’Istituto politecnico della New York University (Nyu-Poly) hanno realizzato un pesce robotico per poi studiare la reazione comportamentale dei pesci alla sua presenza.
 Fish and robots swimming together: attraction towards the robot demands biomimetic locomotion
Fish and robots swimming together: attraction towards the robot demands biomimetic locomotion
Stefano Marras [1,2]
Maurizio Porfiri [2]
1) IAMC–CNR, Località Sa Mardini, Torregrande, 09072 Oristano, Italy
2) Department of Mechanical and Aerospace Engineering, Polytechnic Institute of New York University, New York, USA
I ricercatori dell’Istituto per l’ambiente marino costiero del Consiglio nazionale delle ricerche di Oristano (Iamc-Cnr) e dell’Istituto politecnico della New York University (Nyu-Poly) hanno realizzato un pesce robotico per poi studiare la reazione comportamentale dei pesci alla sua presenza.
I risultati dello studio mostrano che il robot viene accettato come un leader dai pesci, che lo seguono nei suoi movimenti. La ricerca, pubblicata sulla rivista Journal of the Royal Society Interface, illustra il movimento biomimetico del robot e le conseguenti condizioni di turbolenza, mostrando anche che i pesci tendono a sfruttare un vantaggio idrodinamico riuscendo a risparmare energia durante il nuoto.
«Il tratto innovativo di questa ricerca - spiega Stefano Marras - consiste nell’aver fatto interagire i pesci con un robot che imita artificialmente le caratteristiche degli organismi viventi, sia nelle fattezze che nel
movimento, in un ambiente del tutto simile a quello reale. La possibilità di controllare
il pesce artificiale, modulandone il movimento e osservando le
reazioni degli animali, permette di ricavare utili informazioni sugli
schemi collettivi seguiti dagli animali e apre nuovi orizzonti nelle
metodologie di conservazione della specie, dal momento che si
potrebbe influire sul comportamento dei pesci tramite il loro omologo meccanico».
Uno sviluppo significativo dello studio consisterebbe nell'osservare le reazioni dei pesci alla presenza del robot in diversi contesti naturali. In questo modo si potrebbero aprire nuove
prospettive di salvaguardia di specie marine in
pericolo.
«L’allontanamento dei banchi di pesce dalle zone
contaminate da fuoruscite di petrolio o l’aggiramento di dighe che
impediscono il regolare percorso migratorio legato alla riproduzione
- conclude Marras - sono solo alcune delle condizioni di pericolo delle quali i pesci
potrebbero avvantaggiarsi seguendo i robot». Andrea Mameli - www.linguaggiomacchina.it - 10 aprile 2012

Stefano Marras [1,2]
Maurizio Porfiri [2]
1) IAMC–CNR, Località Sa Mardini, Torregrande, 09072 Oristano, Italy
2) Department of Mechanical and Aerospace Engineering, Polytechnic Institute of New York University, New York, USA
Abstract
The integration of biomimetic robots in a
fish school may enable a better understanding of collective behaviour,
offering a new experimental method to test group feedback in
response to behavioural modulations of its ‘engineered’ member. Here,
we analyse a robotic fish and individual golden
shiners (Notemigonus crysoleucas) swimming together in a water
tunnel at different flow velocities. We determine the positional
preference of fish with respect
to the robot, and we study the flow structure using
a digital particle image velocimetry system. We find that biomimetic
locomotion
is a determinant of fish preference as fish are
more attracted towards the robot when its tail is beating rather than
when
it is statically immersed in the water as a
‘dummy’. At specific conditions, the fish hold station behind the robot,
which
may be due to the hydrodynamic advantage obtained
by swimming in the robot's wake. This work makes a compelling case for
the
need of biomimetic locomotion in promoting
robot–animal interactions and it strengthens the hypothesis that
biomimetic robots
can be used to study and modulate collective animal
behaviour.


Commenti